
Mars Rover Challenge

European Rover Challenge
As part of a study project, I took part in the European Rover Challenge in Poland together with other fellow students. The aim of this competition is to complete various scientific tasks with a self-built rover and drone and compete against other colleges and universities in Europe.
This year we made it. We achieved first place 🥇🥳.
The entire project is devided into sub-projects, each of which is part of a study-thesis, such as a preparatory bachelor’s thesis or a final bachelor’s thesis.
My part, together with a fellow student, was the software development for the autonomously flying drone. The aim of this sub-project is to allow the drone to take off, traverse and land autonomously in a drone cage (without GPS) using optical orientation and other sensors.
The FHNW Rover Team
What is the erc about?
The ERC is a thrilling spectacle that showcases the best of the best in planetary exploration. With tasks designed to replicate the challenges faced by real-life rovers on Mars and the Moon, it’s a chance for the new generation of engineers to demonstrate their skills and creativity on a global stage under the watchful eye of leading industry experts and space agencies’ deputies.
Rover
Here you can see our Rover with the new height-adjustable omnidirectional drive unit.

Drone
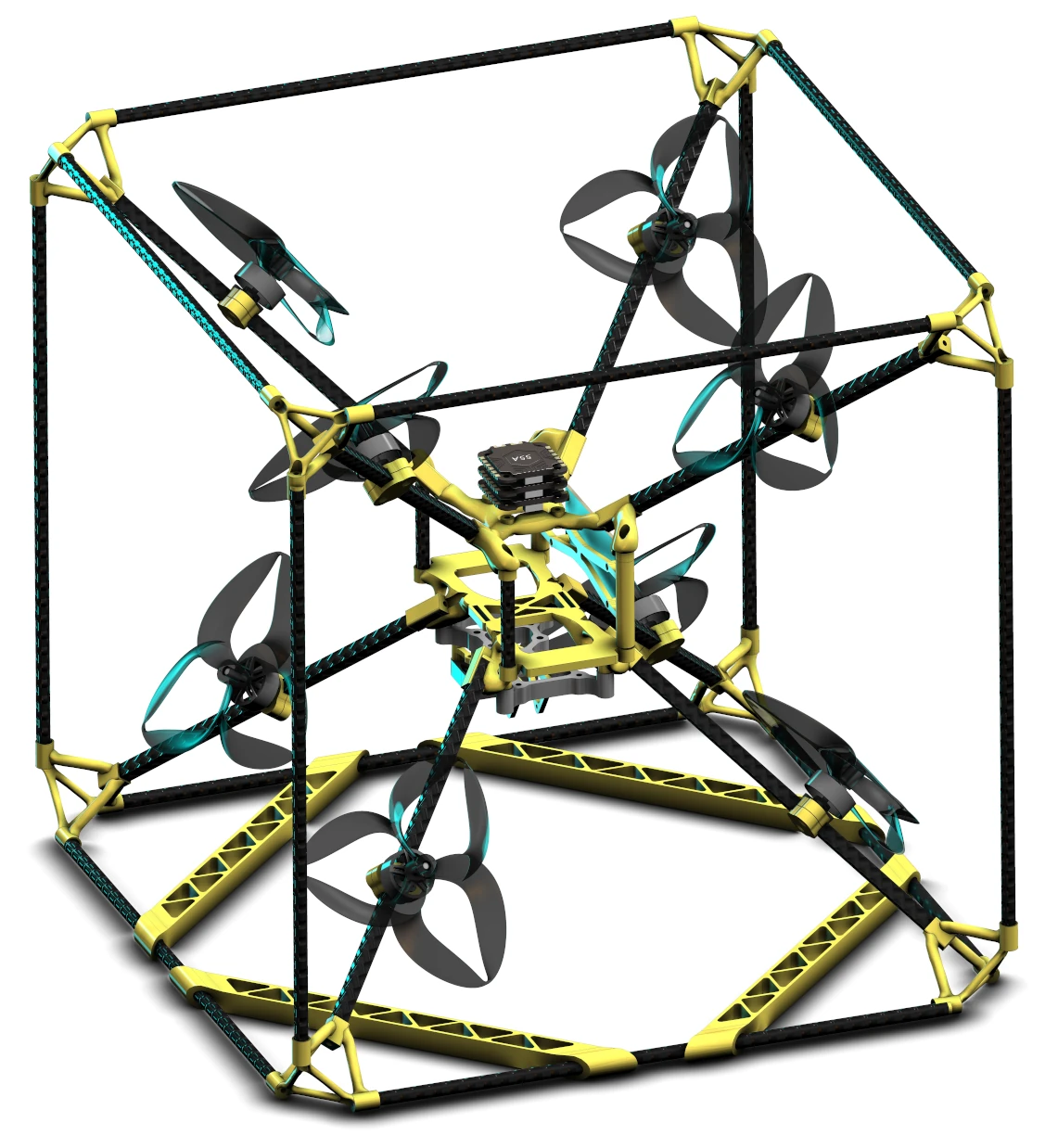
This year, we built an omnicopter drone. It uses eight rotors and can move in any direction using thrust vectoring. This capability is particularly useful for image processing, as the drone does not need to tilt in order to move.
The drone uses a modular software stack with well-defined interfaces, allowing for easy switching specific implementations. Thanks for this approach, the automation is UAV-independent and can be effortless transferred to other drones/flightcontrollers that are using common control protocols like S.BUS or similar. This flexibility is also valuable during testing, as it allows us to use a small, lightweight drone instead of a heavy, fragile one.
Each module has its own responsibility in the autonomous flight process, following the single responsibility pattern. For example: The drone carries a microcontroller that receives control commands from the ground station and forwards them to the next module. The microcontroller’s sole task is to receive, validate and forward these commands. This also simplifies troubleshooting, as the source of problem can be isolated to the respective module.
If you’d like to know more about the challenge, the rover or the drone, feel free to send me a message .
Next steps
The project will be continued with existing and new team members preparing for the ERC challenge 2025. Some components will be retained or slightly improved based on lessons learned from this year’s ERC, while other will be completely redesigned.
It has been an interesting journey, and I have learned a lot over the last two ERC challenges, particularly in the fields of software and electrical engineering.
I wish all the best to the upcoming team members. Let’s rock 😉👍!
Disclaimer
Photo/Video from roverchallenge on roverchallenge.eu
Keep in mind: Some trademarks mentioned are under copyright.